HIL Testing on Real-Time Target Demo
In this version of the HIL demo project, the complete model-based design workflow for developing and testing the ADAS Cruise Control software application (as demonstrated in the Model/Software-in-the-Loop example) has been transitioned to the NI HIL simulation environment and the NI real-time hardware platform.
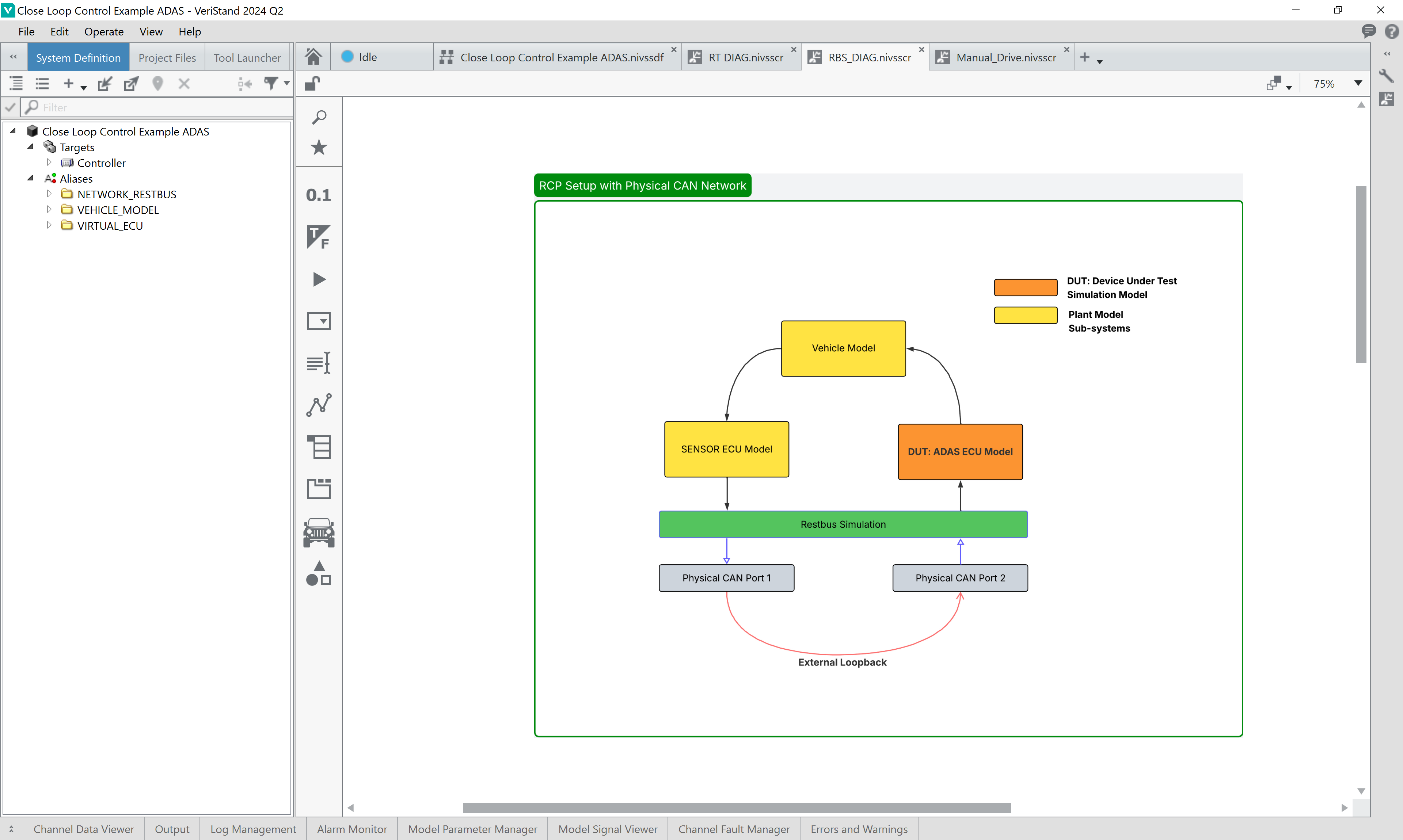
For simplicity, a Rapid Control Prototyping setup (RCP) is used in the example. This setup represented in the diagram below lets users validate:
- plant model real-time execution
- communication between the HIL system and the ECU under test
Note: Real-time hardware is necessary for the execution of this demo project.
HIL Simulation on Real-Time Target Demo Project Download
To run this demo project, both the Windows Host PC and the Real-Time PXI system must be properly set up. Follow the instructions in these sections to install the necessary software and complete the configuration process.
Getting started HIL Example in NI VeriStand